After finally getting my hands on a 3d printer I've decided to take on a very ambitious project. I am attempting to 3d print a flywheel rivals blaster. However I have hit a problem when working on my first prototype. How it works is you hold onto the handle and press the button with your thumb, and then you feed balls into it with the other hand. The moters, which are just some old rapidstrike motors I am using until I get some shark nsr 40's, are powered by three trustfires and a dummy battery. Everything worked well until I started testing. pushing the HIR's in I would only get about a 5 foot range, I adjusted to flywheels so that they would only compress the HIR's 0.5mm instead of 2mm, but I only ended up with about a 10 foot range increase. What I've been thinking is that my stock motors don't have enough torque (something that would be fixed by dropping in sharks), but while I'm at it, I've also been wondering how flywheel weight comes into the equation. My flywheels are standard weight but is there any advantage to making them lighter or heavier? Hopefully some modding experience and maybe a little physics can help.
.
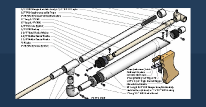
Prototype

Side view

Battery pack

Flywheel bottom

Flywheel top

Flywheel side