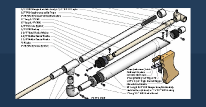
This is Project 13. It is a brushless, stepper-bolt-driven, fully automatic, mag-in-grip pistol.
The flywheel system is built around EMax RS1108 4500KV motors. It is a Hy-con derived (circular gap) profile of 29.5mm wheel spacing and 9.0mm gap. It hits around 120-130fps with Worker Gen3s, although I’m pretty sure the long bore is interfering with the darts since just the cage was doing about 140.

The pusher is a scotch yoke of 24mm stroke driven by an OMC 17HS08-1004S stepper motor and it is currently set at 8.3 darts/second. The 24mm stroke is kind of borderline with Worker Gen3s and may run into issues with 36mm darts if there’s a decap and the foam gets left behind.
The magazines are printed and are unique to this blaster, but they are very similar to angled Talons and with some modifications to the blaster I think it could take Talons.
The blaster is 246mm long and 157mm tall from the bottom of the grip to the top of the rear irons. The main body is 40mm wide, with the stepper poking out to 42.3mm, and the flywheels going out to 58.5mm. The last 26mm on the front are purely cosmetic to taper the profile down slightly. You could easily take that off and print a square-nosed version that would remove that length.
There is a detachable stock that is held in by two pins at the bottom and a spring latch at the top. These pins are 6-32 screws cut down, ground to shape, and press fit into the stock base. To remove, press the latch and rock it back slightly until the latch clears, then slide the stock mount downward. Stock is sized for 3/4” SCH40 PVC.



The rear irons are removable, partly to facilitate printing, and partly to allow for other options to be installed. I CADed a picatinny option, but haven’t actually built it.
The battery is a Lumenier 550mAh 4s lipo.
https://www.getfpv.c...tery-xt-30.html

The ESCs are ZTW Spider 12A, modified with a tach wire for feed control, an upgraded DC link capacitor (Rubycon 25ZLQ180MEFC6.3X11) which has been hooked up perpendicular to the board’s long axis to shave a few mm of length. The motors are wired directly to the ESCs, without connectors, to save more space. The blaster’s main PCB is a custom unit. It takes an Arduino Pro Mini and a DRV8825 carrier board and features headers for the ESC signal cables, trigger, and bolt limit switch, but no other controls. I had to use short headers to fit the connections under the top cover. This board is also used for power distribution to shave a little space and not require splices in the wiring. Battery lead goes to one of the two sets of holes on the side, and ESCs get wired directly to the other sets (ESCs go on the symmetrical pairs). There is bare copper on both sides of the board so you can dump solder on the pad or add bus bars for Vbus and GND. Remember to put something on the board to insulate these bare areas.

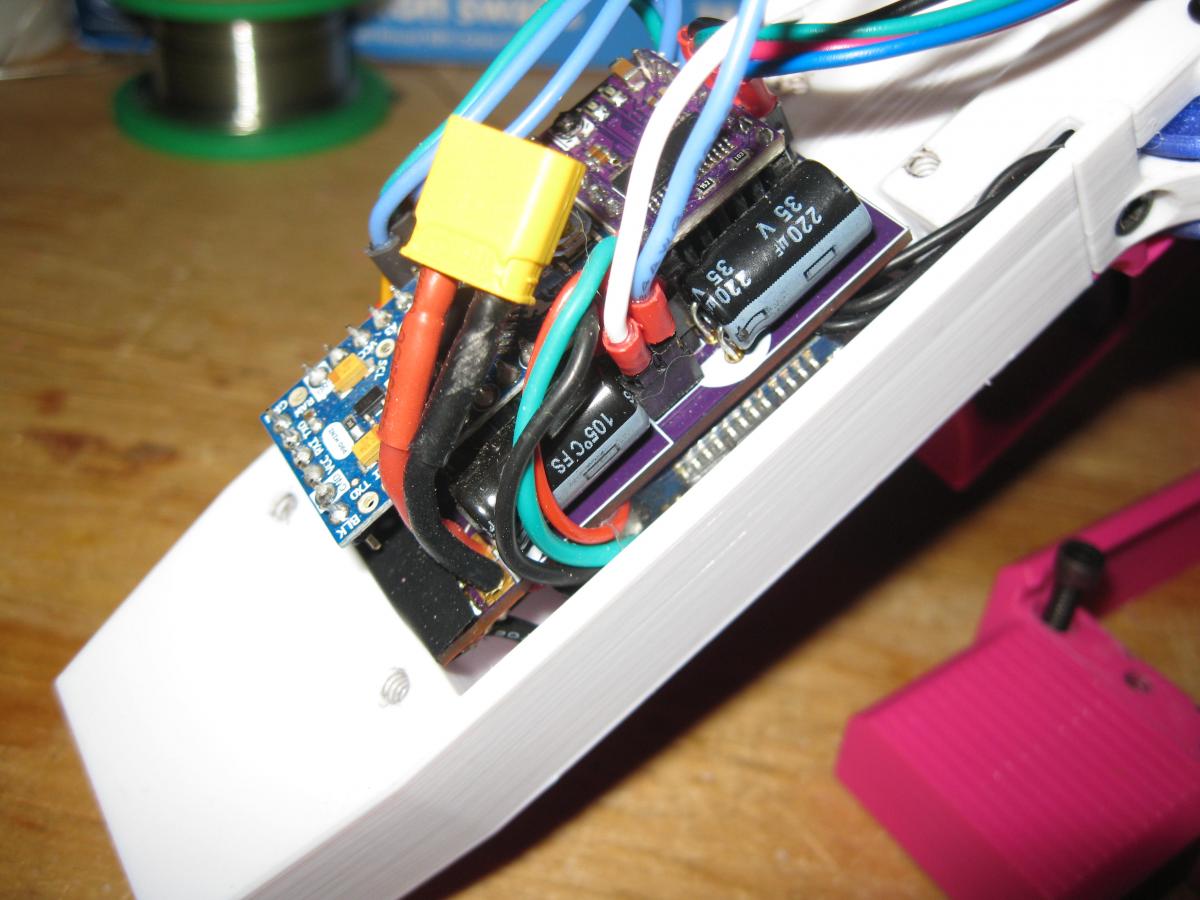
The trigger switch is a full sized microswitch, with the solder tabs cut way down so it fits between the trigger and the magwell. I also cut a notch into the top corner of the body to pass a wire through.

As with a lot of my recent work I should credit torukmakto4. While this shares no parts with any of his designs, many of the ideas have root in those designs. This obviously looks a lot like the ACS but much of that (though not all) is convergent evolution, not direct inspiration. And the software is largely his work as well. Also thanks to Matthew Bregg for bringing the ZTW Spider 12A to my attention.
CAD, firmware, and Gerbers in https://drive.google...Iv5?usp=sharing
Filaments are Overture magenta, Esun white, and Yoyi transparent violet. The magazine pictured is Overture transparent with a magenta follower.
Errata and other notes:
- The file I provide here for the upper is what I printed, but it required rework after the fact. It needed to have some deeper pockets cut into the corners of the stepper recess to fit it.
- I forgot to add a pocket on the stock base for the latch spring to match the pocket in the latch. I just drilled a hole here on my printed copy.
- Most screws are 6-32, with a couple exceptions. Motor screws are m2, stepper mount screws are m3, there is an m3 in the mag release due to space constraints, and there is a 4-40 set screw in the crank for the same reason.
- The spring on the stock latch was taken from my parts box so I have no part number to provide.
- I can confirm bs_nfet firmware on the 12A version of the ZTW Spiders, and also that the portable chromium install and rapidflash method that Matthew Bregg detailed at https://torukmakto4....or-flyshot.html works for them.
- In the one game I used it in so far, it was horribly inaccurate, although I’m not sure how much of that was the blaster and how much was the darts (used Worker Gen3s), or me, or the 20mph wind that day. This may be the bore interference again.
- Some more notes on the magazines: As I mentioned they are very similar to angled Talons. I originally intended this to take angled Talons but as I thought about it I realized I’m designing this blaster for me, not anyone else. I don’t already have an infrastructure around angled Talons and would be printing my magazines anyway, so I felt comfortable making more changes than I originally planned. These magazines have the same overall external dimensions, although they’re just rectangles and don’t have the notches on the front and back that angled Talons do. And because they print outsides on the bed the feed lips don’t protrude beyond the body dimensions. The front edge just under where the dart gets pushed out is slightly lower down here to accommodate a bit of flywheel cage geometry. And finally, they have a front catch notch. To make this blaster compatible with angled Talons, the following changes would need to be made:
- Pocket out the opening to allow the feed lips to fit. I don’t know what this would do for strength.
- Remove the offending geometry from the flywheel cage area on the lower or alternatively grind that part out of the magazines.
- Make some sort of rear magazine catch or add a front notch to each magazine.